Моделювання руху самобалансірующіхся велосипеда
- Що ми знаємо про самобалансування велосипедів
- Багатотільних модель велосипеда
- Моделювання руху самобалансірующіхся велосипеда
- Проведення аналізу стійкості
- Різні значення початкової швидкості
- Кут повороту керма
- Заключні зауваження щодо використання аналізу багатотільних динаміки для вивчення самоустойчівості...
- Додаткові матеріали
Наше деловое партнерство www.banwar.org
Припустимо, ви рухаєтеся на велосипеді, і раптом хтось штовхає вас збоку. Щоб швидко відновити рівновагу і уникнути падіння, ви повернете кермо велосипеда в напрямку поштовху. Велосипедисти роблять це рефлекторно, але дивно, що велосипед може виконати цю дію самостійно. Сучасні велосипеди можуть самостійно утримувати рівновагу навіть при русі без управління. Подивимося, як цей ефект можна змоделювати в COMSOL Multiphysics.
Що ми знаємо про самобалансування велосипедів
Сучасний велосипед не дуже сильно відрізняється від безпечного велосипеда - однієї з перших конструкцій, що з'явилася в 80-х роках XIX століття. Після більше ста років вчені все ще намагаються з'ясувати, за рахунок яких ефектів велосипед стає самобалансіруемим. Іншими словами, як неуправлемий велосипед зберігає рівновагу у вертикальному положенні? Опису руху велосипеда за допомогою аналітичних рівнянь присвячено безліч опублікованих робіт. Однією з перших важливих публікацій на цю тему була стаття Френсіса Уиппла, в якій він отримав загальні нелінійні рівняння динаміки велосипеда, керованого велосипедистом без використання рук.
Прийнято вважати, що стійкість велосипеда забезпечується двома факторами - гіроскопічною прецессией переднього колеса і стабілізуючою дією поздовжнього нахилу осі повороту колеса. Зовсім недавно команда дослідників з Делфта і Корнелла (див. посилання №3 ) Опублікувала всеосяжний огляд лінеаризованих рівнянь руху для моделі велосипеда Уиппла. Вони використовували свої результати для демонстрації самобалансірующіхся велосипеда. Їх дослідження показує, що цьому явищу можна дати просте пояснення. Поєднання факторів, в тому числі гироскопического і стабілізуючого ефектів, геометрії велосипеда, швидкості і розподілу маси дозволяє некерованому велосипеду зберігати вертикальне положення.
Надихнувшись цією роботою, ми побудували динамічну модель багатотільних системи, щоб продемонструвати самобалансірующіхся рух велосипеда, керованого велосипедистом без допомоги рук.

Положення велосипеда в різні моменти часу.
Багатотільних модель велосипеда
ця навчальна модель розраховує динаміку руху велосипеда, керованого велосипедистом без допомоги рук, на плоскій поверхні при впливі поперечної сили, що викликає відхилення від прямолінійного руху. Ми продовжили дослідження, щоб проаналізувати, як велосипед самобалансірующіхся при різних величинах швидкості і нахилу осі.
Щоб побудувати модель велосипеда, зробимо такі припущення:
- Всі компоненти вважаються жорсткими.
- Тертя у всіх шарнірах не враховується.
- Колеса велосипеда моделюються в припущенні дотичного контакту з землею.
- А ці колеса прикладені обмеження на обертання.
- Передбачається, що велосипед рухається по плоскій поверхні.
- Передбачається, що велосипедист не використовує руки для управління велосипедом, що задано шляхом збільшення маси на задній рамі.
Велосипед складається з чотирьох жорстких компонентів - заднього колеса, задній рами, об'єднаної з велосипедистом, передній рами з кермом і переднього колеса. Хоча колеса мають кінцеву товщину, будемо вважати, що вони мають точковий контакт із землею. Задня частина рами і заднє колесо з'єднані за допомогою шарніра. Ще один шарнір з'єднує дві частини рами. Ось цього шарніра формує рульову вісь велосипеда. Третій шарнір з'єднує переднє колесо і передню частину рами.
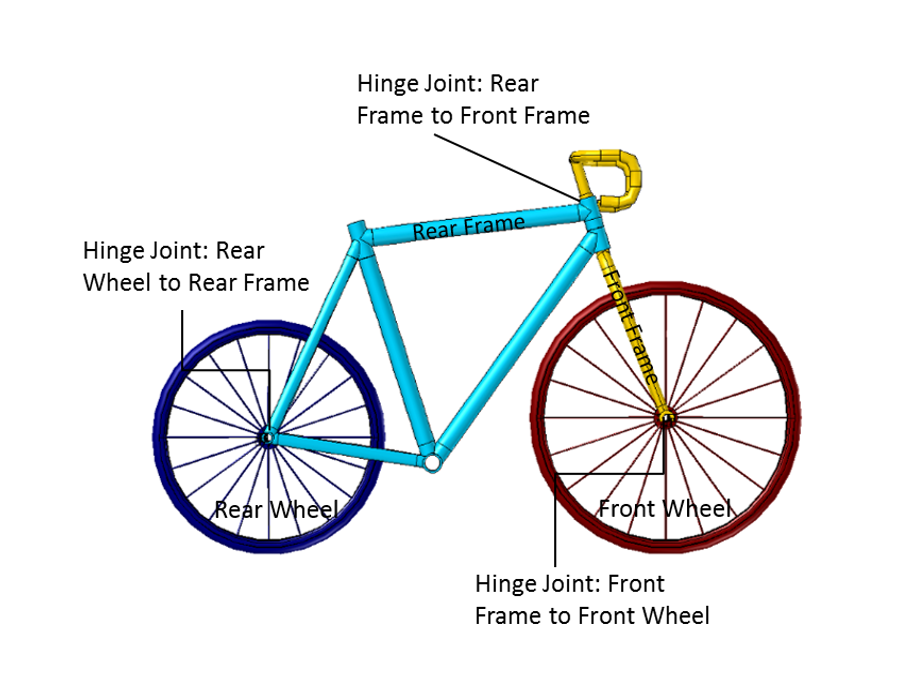
Геометрія велосипеда в COMSOL Multiphysics.
Геометрія велосипеда, яка використовується в цій моделі, показана вище. Інерційні властивості компонентів велосипеда визначаються масою, моментом інерції і положенням центру мас. Важливими геометричними параметрами є радіус колеса, колісна база (wb) і напрямок осі нахилу (st). Нахил рульової осі контролює догляд вилки переднього колеса (c).
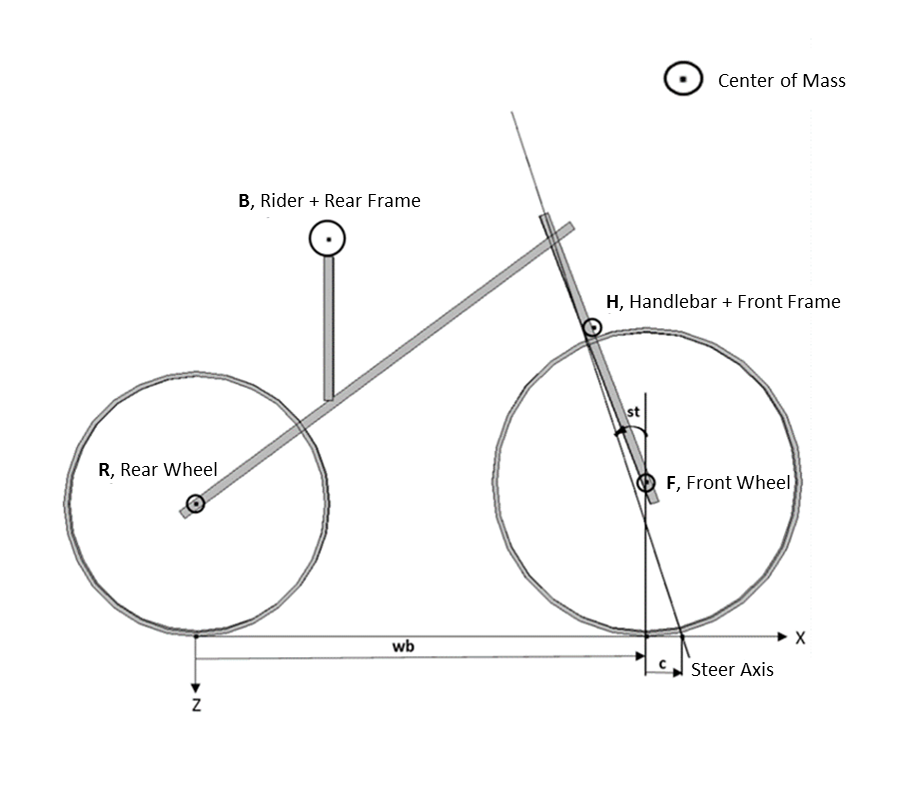
Схема велосипеда.
Як згадувалося раніше, вважається, що велосипед котиться по поверхні. У разі чистого кочення, швидкість в точці контакту з землею дорівнює нулю. У цій моделі обертання колеса реалізовано без використання будь-яких контактних взаємодій для зменшення обчислень. Замість цього ми використовуємо альтернативні підходи динаміки багатотільних систем для моделювання руху. Щоб описати відхилення від курсу, нахил і обертальний рух колеса, створюються три відповідні безінерційні зв'язку. Ми задаємо три обмеження по прослизанню, щоб обмежити проковзування коліс в прямому напрямку, в поперечному напрямку, і перпендикулярно поверхні контакту. Так як зафіксувати швидкість не представляється можливим, ми введемо обмеження переміщення.
Нижче ми розповімо, як задається це обмеження. Більш докладно ця умова описано в навчальній моделі обертання жорсткого колеса .
Щоб забезпечити чисте кочення коліс і обмежити їх прослизання в трьох напрямках, нам потрібні три граничних умови. 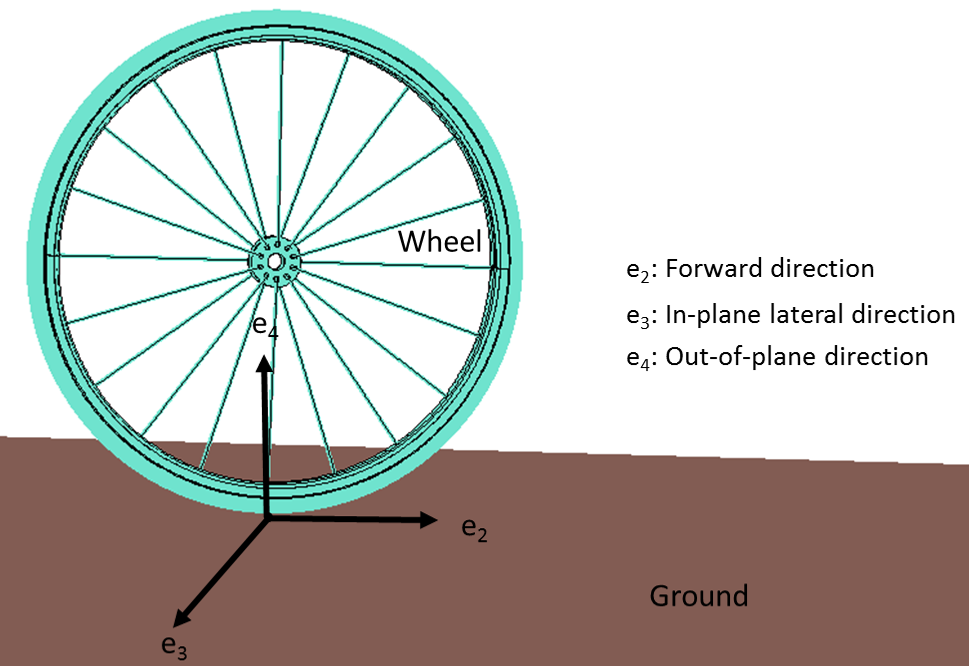
Модель колеса з відображенням напрямків, в яких обмежені переміщення.
Використовуються такі обмеження: Відсутність прослизання в прямому напрямку:
{\ Frac {d \ bold {u}} {dt}. \ Bold {e} _ {2} = r \ frac {d \ bold {\ theta} _s} {dt}}
Відсутність прослизання в поперечному напрямку:
\ Frac {d \ bold {u}} {dt}. \ Bold {e} _ {3} = r \ frac {d \ bold {\ theta} _ {l}} {dt}
Відсутність прослизання перпендикулярно поверхні контакту із землею:
\ Frac {d \ bold {u}} {dt}. \ Bold {e} _ {4} = 0
де \ bold {e} _ {2}, \ bold {e} _ {3}, and \ bold {e} _ {4} - миттєве напрямок (похила вісь), поперечний напрямок (вісь обертання) і нормаль до поверхні контакту (\ bold {e} _ {4} = \ bold {e} _ {2} \ times \ bold {e} _ {3}), відповідно;
\ Frac {d \ bold {u}} {dt} - поступальна швидкість руху; r - радіус колеса; \ Frac {d \ bold {\ theta} _ {s}} {dt} - кутова швидкість обертання; \ Frac {d \ bold {\ theta} _ {l}} {dt} - кутова похила швидкість.
Оскільки застосувати зазначені граничні умови до швидкості неможливо, вони дискретизируются в часі і накладаються в такий спосіб:
(\ Bold {u} - \ bold {u} _ {p}). \ Bold {e} _ {2} = r (\ bold {\ theta} _ {s} - \ bold {\ theta} _ {sp })
(\ Bold {u} - \ bold {u} _ {p}). \ Bold {e} _ {3} = r (\ bold {\ theta} _ {l} - \ bold {\ theta} _ {lp })
(\ Bold {u} - \ bold {u} _ {p}). \ Bold {e} _ {4} = 0
де \ bold {u} _ {p}, \ bold {\ theta} _ {sp} і \ bold {\ theta} _ {lp} - це вектор зміщення, кут обертання і нахилу в попередній момент часу, відповідно.
У дискретних граничних умовах, що забезпечують відсутність прослизання, використовується результат розрахунку положення колеса на попередньому кроці по часу. Положення жорсткого тіла, обертання і миттєві положення осей на попередньому кроці по часу зберігаються за допомогою глобальних рівнянь і вузла Previous Solution в нестаціонарному вирішувача.
Моделювання руху самобалансірующіхся велосипеда
Для аналізу ми обрали велосипед, кут нахилу керма якого становить 18 °. Початкове значення швидкості велосипеда становить 4.6 м / с. Через 1 секунду після початку руху на велосипед протягом дуже короткого періоду часу впливає сила 500 Н. Під дією сили велосипед відхиляється від прямолінійної траєкторії руху в заданому напрямку.
Протягом першої секунди велосипед рухається вперед уздовж спочатку заданого напрямку з постійною швидкістю. Потім бічне зусилля викликає відхилення. Відзначимо, що велосипедист не тримає руки на кермі і не може управляти балансом велосипеда. Що відбувається далі? Ми можемо помітити, що як тільки велосипед починає нахилятися, кермо повертається в напрямку падіння. Коригування положення керма при падінні призводить до відновлення рівноваги велосипеда.
Велосипед продовжує рухатися вперед, і в процесі руху починає нахилятися в зворотну сторону. Цей нахил менше за величиною, а рух керма точно слід за нахилом з невеликим відставанням. Таке коливання вправо-вліво триває і в кінцевому підсумку згасає. Велосипед рухається вперед в строго вертикальному положенні і злегка збільшує швидкість. Коливання керма, кути повороту і кутова швидкість поступово знижуються і згасають.
Рух велосипеда на рівній поверхні при відхиленні від прямолінійного руху. Стрілка показує нахил велосипеда.
Результати розрахунку кутів нахилу і повороту керма (зліва) і відносна кутова швидкість (праворуч) велосипеда.
Проведення аналізу стійкості
Таким чином, ми дізналися, що велосипед може самобалансіроваться. Дослідження показало, що неможливо виділити якийсь один параметр, що визначає стійкість велосипеда. Конструкція велосипеда, розподіл маси і швидкість руху - всі ці фактори впливають на стійкість. Щоб краще зрозуміти це явище, ми провели додатковий аналіз для вивчення впливу двох параметрів - початкової швидкості і нахилу рульової осі. Ми використовували зазначену вище вище модель велосипеда з кутом нахилу осі керма 18 ° і початковою швидкістю 4.6 м / с в якості вихідної конфігурації і провели параметричний аналіз впливу цих двох факторів.
Різні значення початкової швидкості
Велосипед не може залишатися в строго вертикальному положенні, коли стоїть на місці. Ми змінювали швидкість руху від 2.6 м / с до 6.6 м / с з кроком 1 м / с, щоб оцінити вплив цього параметра. В діапазоні 2.6-3.6 м / с велосипед нахиляється занадто сильно і нестійкий. На швидкості 5.6 м / с швидкість нахилу прагне до нуля, але сам кут нахилу набуває нульове значення. Хоча дана конфігурація стійка, велосипед буде рухатися по колу з невеликим нахилом. На 6.6 м / с нахил і кут повороту керма збільшуються з часом, роблячи рух нестійким.
Нестійкий Сталий Нестійкий 2.6 м / с 3.6 м / с 4.6 м / с 5.6 м / с 6.6 м / с
Стійкий випадок відповідає швидкості 5.6 м / с (зліва), а нестійкий - швидкості 6.6 м / с (праворуч).
Кут повороту керма
Вузол рульового управління дуже важливий для самобалансування велосипеда. Якщо велосипедом неможливо управляти (наприклад, якщо кермо заклинило), то велосипед не зможе компенсувати нахил, тому він в результаті впаде. У зв'язку з цим, поворот осі керма, який контролює догляд вилки, також впливає на самобалансування велосипеда.
Щоб проаналізувати вплив повороту осі керма на стійкість велосипеда, ми змінювали кути повороту керма від 15 ° до 21 ° з кроком 1 °. При вугіллі в 15 ° нахил і кут повороту керма збільшуються з часом, що робить дану конфігурацію нестійкою. Велосипед стійкий в діапазоні від 16 ° до 19 ° і нестійкий для великих кутів. При значеннях повороту більше 19 °, нахил і кут повороту коливаються, і ці осциляції з часом зростають, що призводить до втрати стійкості.
Нестійкий Сталий Нестійкий Нахил 15 ° 16 ° 17 ° 18 ° 19 ° 20 ° 21 ° Догляд вилки 0.066 м 0.0706 м 0.0753 м 0.08 м 0.0848 м 0.0896 м 0.0945 м
Два випадки нестійкості з поворотом в 15 ° (ліворуч) і 21 ° (справа).
Заключні зауваження щодо використання аналізу багатотільних динаміки для вивчення самоустойчівості велосипеда
У цій публікації ми розповіли, як змоделювати рух некерованого самобалансірующіхся велосипеда за допомогою модуля Динаміка багатотільних систем (Multibody Dynamics) в COMSOL Multiphysics. Ми продемонстрували, як реалізувати обмеження на прослизання на жорсткому колесі через рівняння, а потім об'єднали ці обмеження з багатотільних моделлю велосипеда. Потім ми проаналізували вплив початкової швидкості і повороту осі на стійкість велосипеда. Оцінивши ці параметри, ми побачили, що велосипед може зберігати стійкість в одній конфігурації і втрачати її в інший.
Самобалансування велосипеда є наслідком цілого ряду факторів. За допомогою нашого аналізу і відповідно з попередніми дослідженнями ми продемонстрували, що стійкість велосипеда пов'язана з його здатністю "підрулювати" в напрямку нахилу.
Додаткові матеріали
- Навчальна модель: Обертання жорсткого колеса
- Навчальна модель: Моделювання руху велосипеда на плоскій поверхні
- Meijaard, Jaap P., Jim M. Papadopoulos, Andy Ruina, and Arend L. Schwab. "Linearized dynamics equations for the balance and steer of a bicycle: a benchmark and review." У працях Королівського Товариства Лондона: Mathematical, Physical and Engineering Sciences, vol. 463, no. 2084, pp. 1955-1982. The Royal Society, 2007.
- Публікації в блозі: Використання оператора Попереднє рішення (Previous Solution) при розрахунку в тимчасовій області
Що відбувається далі?